Cahier des charges
Nous disposons d’une zone de travail maximum de 5m de long et de 3.2m de large. En ce qui concerne la masse, nous avons des cartons d’une masse de 10kg. Auquel on ajoute la masse du préhenseur dans notre cas nous prendrons 10kg. Ce qui nous fait une masse de préhension en sortie de bras du robot de minimum 20Kg.
Pour choisir notre robot nous avons créé une matrice de choix en y intégrant le critère de charge, de taille, de durabilité, de vitesse et de poids du robot.
Nous avons donc choisi cinq robots capables de respecter le cahier des charges. Nous avons ensuite défini nos choix en fonction de l’importance des critères avec des coefficients.
La taille du rayon d'action a une importance pour l'organisation de l'entrepôt, plus elle sera grande, plus cela facilitera le rangement des palettes.
Sa durabilité retardera le changement du robot et ainsi fera économiser de l'argent à l'entreprise.
La vitesse du robot permettra de diminuer le temps de chargement sur les palettes.
Afin de déterminer un coût pour l’acquisition du robot, nous sommes partis du principe que plus le robot a une masse élevée plus le coût sera élevé.


Origine et Trajectoire
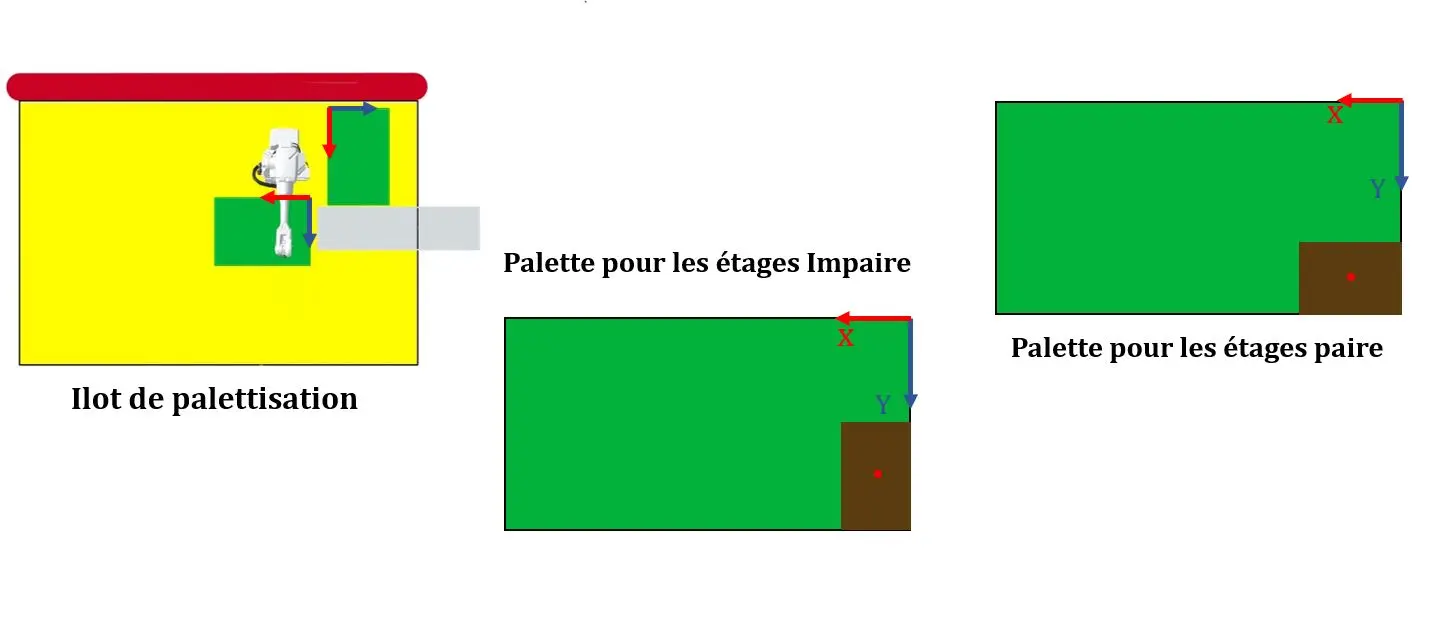
Afin de préparer au mieux ma programmation je commence par placer deux repères : un dans chaque coin des palettes (comme ci-contre). Ces repères ont été placés de façon à ce que le code pour une palette fonctionne pour la deuxième.
Puis
j’ai placé deux points d’origine : un pour les étages impairs et un pour
les étages pairs. J’ai fait en sort que les
premiers points soient situés au milieu du carton afin de faciliter les
décalages.
Comme
vous pouvez le constater le point de l’étage impaire (en rouge) est situé au
centre du carton. Point, le plus éloigné en Y du robot, afin de limiter les
collisions les cartons au cours du placement sur les palettes.
Pour le second point je suis parti du même principe. En effet, le point est situé au centre du carton, mais le placement du carton étant différent, le point est décalé différemment.
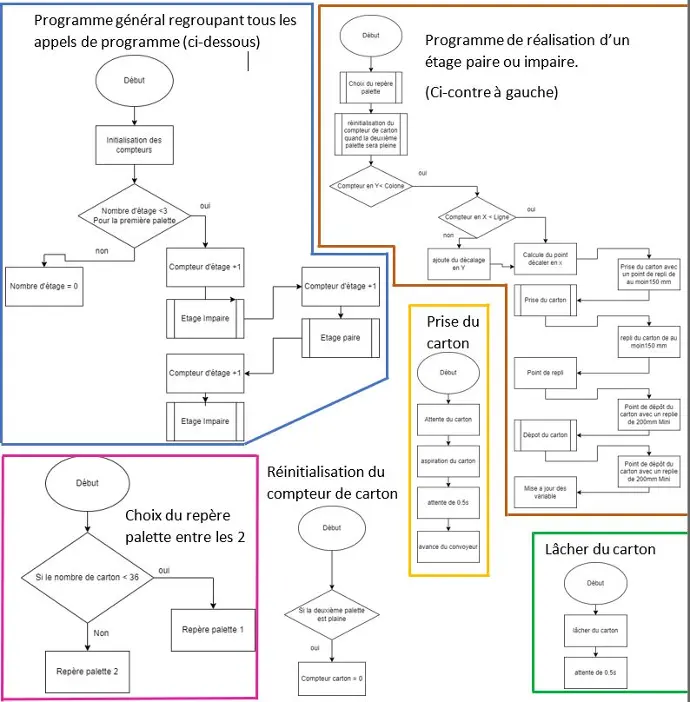
Logigramme
Un logigramme, également connu sous le nom de diagramme de flux, est un outil graphique qui représente de manière séquentielle et ordonnée les différentes étapes d’un processus, d’un système ou d’un algorithme informatique. Il est utilisé pour documenter, étudier, planifier, améliorer et communiquer des procédures souvent complexes, en les transposant dans des schémas clairs et faciles à comprendre
Scénario
Début de la première partie :
1- Détection de la présence de la palette (à remplir) grâce au capteur de fin de course.
2- Vérification que la palette est vide grâce à un capteur photoélectrique placer en diagonal si le signal revient alors la palette vide
3- Vérification de la fermeture de la porte coulissante Vertical de la palette à remplir.
4- Convoyeur à bande du tapis de la palette à remplir sur off.
5- Verrine de la palette qui va être remplie sur rouge. Et la deuxième palette sur vert
6- Si toutes les validations sur off alors Début du programme de remplissage de la palette sinon attente.
7- A l’arrivée du programme au 3ème étage reprise de la partie 1.
Evacuation des palettes :
1- Quand palette est pleine.
2- Ouverture de la porte coulissante verticale.
3- Evacuation de la palette par le convoyeur à bande.
4- Fermeture de la porte
5- Quand la masse d’une palette vide est détectée, ouverture de la porte pour faire rentrer la palette.
6- Arrêt du convoyeur à partir de la détection du capteur de fin de cours.
En cas de maintenance :
1- Verrouillage électronique jusqu’à pression sur le bouton d’arrêt d’urgence
2- Après de déverrouillage par le bouton d’arrêt d’urgence ouverture par clé de la porte

PROJET ROV V2
Présentation
Dans le cadre de nos études, nous avons à réaliser un projet ayant pour thème : « les outillages pour ROVs ».
Nous avons décidé que notre objectif principal serait de concevoir de l’outillage adaptable sur des ROVs déjà présents sur le marché, pour un coût le plus raisonnable possible, et ce, sans concession sur le bon fonctionnement du matériel. Cependant, nous avons décidé de pousser notre démarche plus loin en concevant et fabriquant un nouveau ROV capable d’opérer avec notre outillage tout en étant le plus accessible possible et modulable, tout en essayant d’éliminer les défauts que comportait le ROV réalisé par les promotions précédentes. Tout cela pour permettre au plus grand nombre de pouvoir bénéficier des avantages que représentent les ROVs.
Une prise de contact suivie d’un partenariat avec les étudiants en Génie Biologique a orienté le choix de nos outillages. Nous en avons donc conçu 3 en fonction de leurs besoins afin qu’ils puissent collecter des données pour suivre l’évolution d’un cours d’eau local, la Penfeld à Brest (préleveur d’eau, pince, capteurs de Ph et de température).
Toujours dans la démarche de permettre à un maximum de personnes n’ayant pas d’énormes moyens financiers de bénéficier des avantages et des possibilités qu’offre un ROV, nous avons également pour objectif, si le temps imparti nous le permet et que les tests à l’eau sont concluants, de mettre à disposition du grand public les plans, le programme permettant de piloter le ROV, la liste des composants ainsi qu’une notice de fabrication pour que n’importe quelle personne bénéficiant d’un outillage adapté puisse fabriquer son propre ROV.
Informations pratiques :
- Ce projet se déroule sur les semestres 3 et 4 de notre deuxième année de Génie Mécanique et Productique. Il pourra également être poursuivi durant la troisième année.
- Nous avons commencé ce projet en septembre 2023. Le temps imparti pour la deuxième année est de 130 h au troisième semestre puis de 65 h au quatrième, soit un total de 195 h sur l’année.
Les contraintes du projet
Lors de la conception de notre ROV, nous devrons prendre en compte plusieurs types de contraintes mentionnées ci-dessous et que nous détaillerons plus tard dans notre compte-rendu (analyse fonctionnelle et détail des solutions techniques).
Contraintes matérielles :
Le ROV doit pouvoir être fabriqué avec les moyens disponibles à l’IUT ou à partir de pièces disponible dans le commerce.
Contraintes liées au milieu :
- Respect de la faune et de la flore
- Résistance au milieu aquatique (choix des matériaux, forme, épaisseurs…)
- Visibilité pour le pilote du ROV
- Manœuvrabilité dans le milieu aquatique
Contraintes d’autonomie énergétique
- Alimentation du ROV (moyen de propulsion, électronique embarquée pour la chaîne de commande…) et de l’outillage pouvant être embarqué
Contraintes de modularité
- Possibilité de pouvoir embarquer différents types d’outillages
Contraintes d’encombrement et de masse
Contraintes financières
Contraintes liées au pilotage du ROV :
- Pilotage depuis la surface, du ROV et de ses outillages (choix des éléments électroniques nécessaires et du mode de transmission des données)
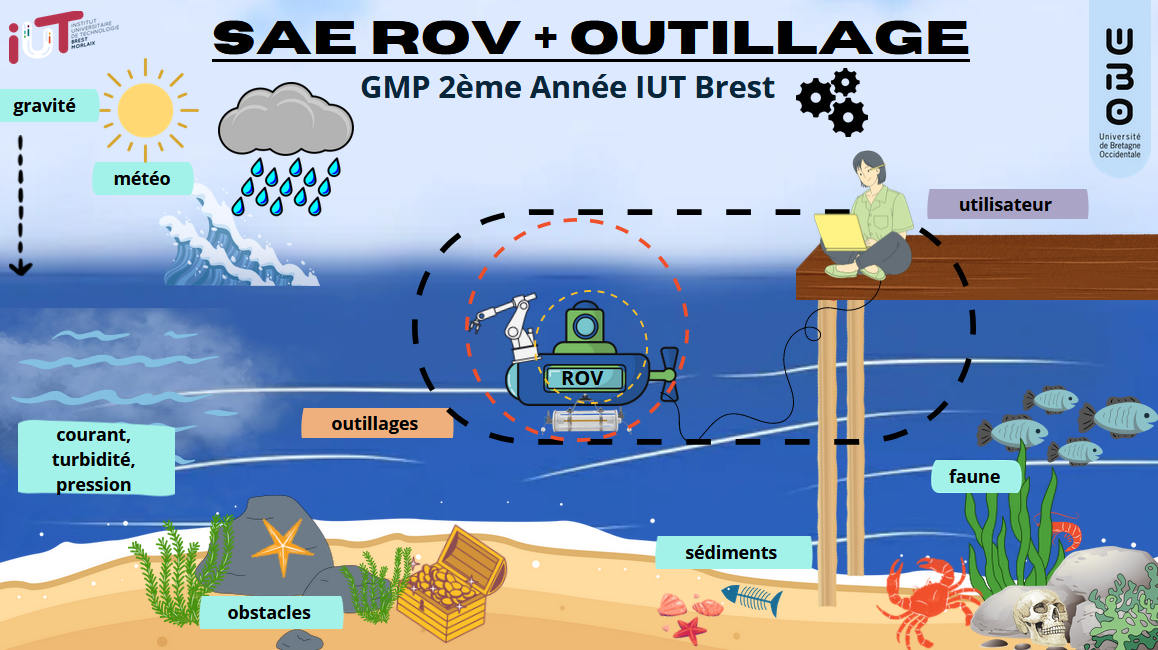
Schéma de contexte
Afin d’être plus efficaces dans la réalisation des analyses fonctionnelles, que ce soit pour le ROV ou ses outillages, nous avons réalisé le schéma de contexte ci-dessus. Celui-ci permet de définir et de mettre en avant plusieurs domaines d’étude :
· Cercle jaune : ROV seul
· Cercle rouge : ROV + outillage (s)
· Cercle noir : ROV + outillage (s) + utilisateur
Il permet également de recenser et de représenter visuellement les éléments extérieurs qui pourront agir sur les différents domaines autour du ROV (cités précédemment), que ce soit la faune marine, les événements climatiques…
La réalisation de ce schéma s’est avérée très utile pour avoir une vision globale des contraintes à prendre en compte lors de la conception.

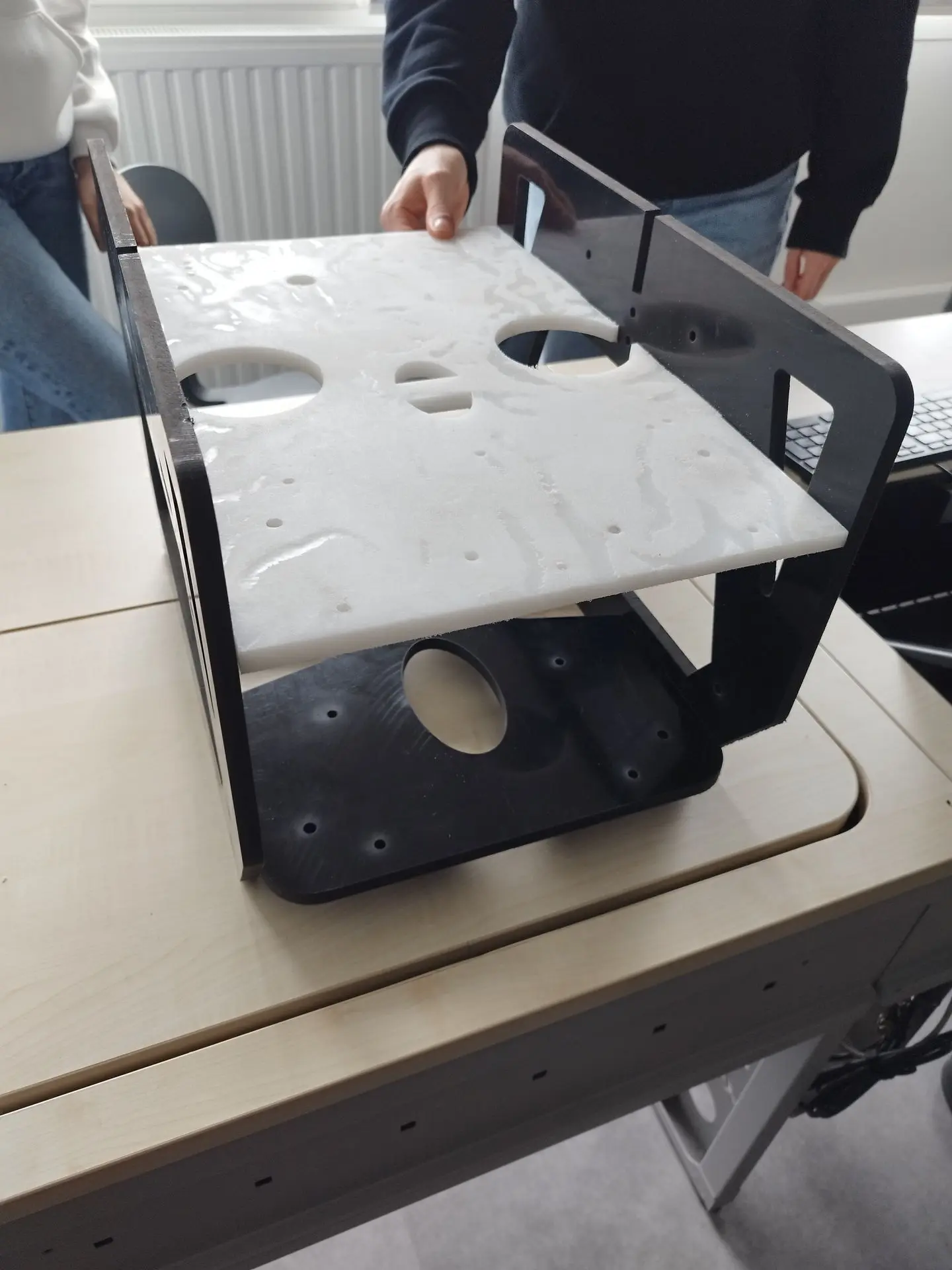
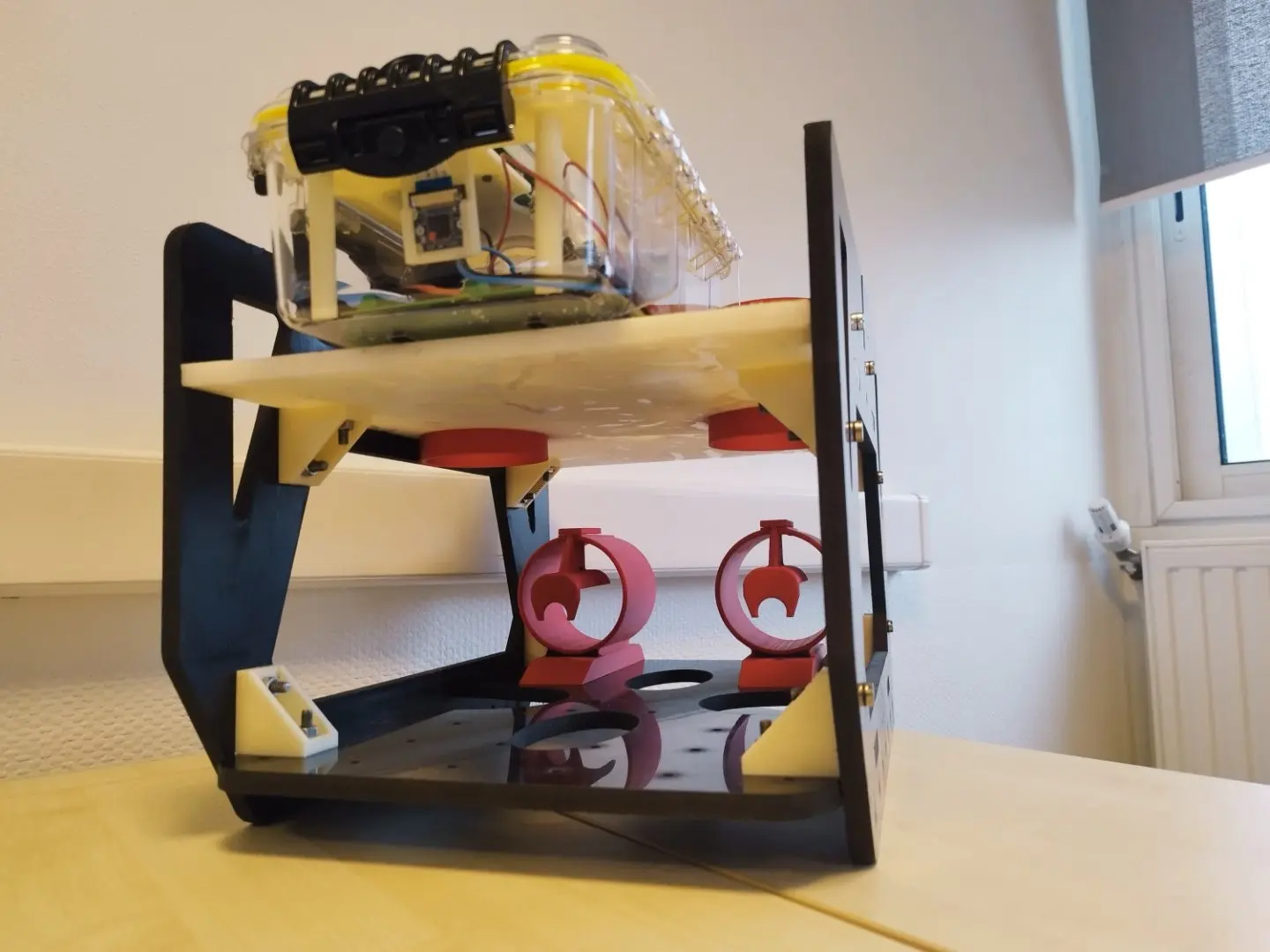
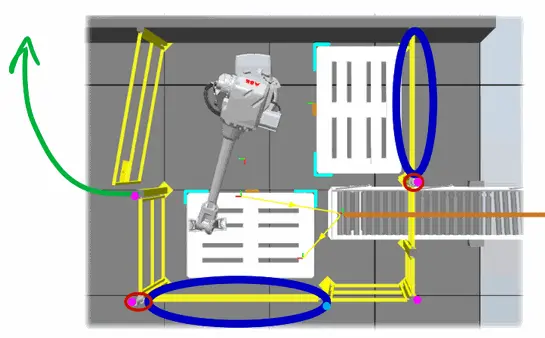
Le croquis ci-contre
représente la quasi-totalité des solutions retenues pour notre ROV V2. En
effet, celui-ci contient de multiples informations telles que la disposition
des moteurs, de la boîte de contrôle, mais aussi des espaces libres destinés à
contenir les différents outillages. De légères modifications ont été effectuées,
comme l’emplacement des moteurs de propulsion horizontale, maintenant fixés sur
le « premier étage ».
La réalisation de ce croquis nous a permis de mieux nous comprendre au sein de l’équipe et de nous répartir les tâches tout en sachant à quels éléments il fallait faire attention pour concevoir un système compatible avec les autres solutions représentées. L’image ci-contre représente un croquis de notre ROV V2, en effet, celui-ci contient de multiples informations telles que la disposition sur le ROV des moteurs de la boite de contrôles, mais aussi des espaces libres qui pourrons contenir les différents outillages.
De plus, sur ce schéma, nous pouvons constater les systèmes de fixation et la structure du ROV, nous reviendrons plus en détail dessus sur la partie structure.